 This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 815044
This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 815044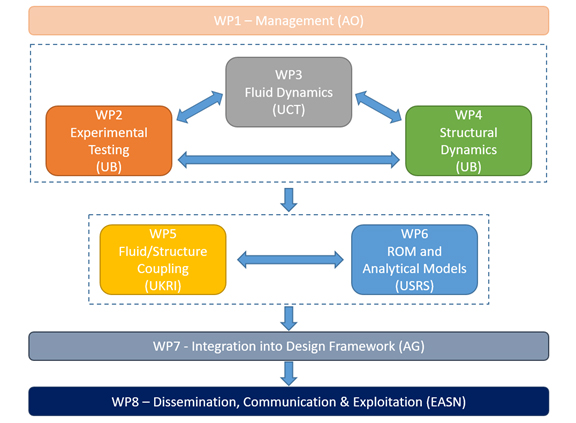
A multidisciplinary methodological approach is adopted by the consortium partners so as to materialise SLOWD objectives and expected results. The project is structured across eight Work Packages (WPs) as illustrated in the Work Plan above. Each work package is a unit of work clearly distinguishable from other such work packages with scheduled start and completion dates aiming at subdividing and facilitating the work that will be performed within the project. As illustrated, in the frame of SLOWD the work is divided in six technical WPs, one WP devoted to Dissemination and Exploitation activities (WP7) and one WP for Management and Coordination activities (WP1).
WP1: Management
WP Leader: AIRBUS OPERATIONS LIMITED (AO)
The overall objective of WP1 Management comprises planning, organization, coordination and controlling of SLOWD project in order to accomplish the targeted goals.
Project management aims to:
- Ensure effective coordination and collaboration among partners
- Ensure the fulfillment of the overall goals of the project, within the time and budget constraints
- Assess the quality and the on-time delivery of project’s results
- Maintain accurate records of cost and effort reports by partners
- Manage and communicate with the Advisory Board
- Minimizing risks and developing contingency plans and corrective actions accordingly
WP2: Experimental Testing
WP Leader: UNIVERSITY OF BRISTOL (UB)
The overall objective of WP2 Testing comprises the design, manufacture and testing of a series of test model wing structures that will be used to:
- Provide data to validate the nonlinear structural dynamics modelling methods
- Provide data to validate the fluid-structure interaction modelling methods on small scale and full-size wings and evaluate differences in modelling small and large-scale sloshing tests
- Provide experimental demonstration of the use of sloshing for gust loads alleviation and the optimization of structure and fluid parameters
- Provide experimental demonstration of the behavior of different types of fluid in sloshing
WP3: Fluid Dynamics
WP Leader: UNIVERSITY OF CAPE TOWN (UCT)
The overall objective of WP3 is to assess the accuracy of various modelling approaches in simulating the fluid flow physics prevalent in aircraft fuel slosh. Particular emphasis will be on the quantitative description of the damping effects due the interaction between fuel and wing structures. The physics to be considered for this purpose include momentum conservation, viscous effects (including turbulence) and surface tension. Both liquid and gas phases will be modelled and with several SPH tools as well as VOF codes. The various modelling approaches will be compared by simulating a common set of test cases, taken from the results of WP2, available scientific literature or past industrial experience available to the partners. Focus will be on accuracy and computational cost. As the emphasis is on fluid physics modelling, slosh excitation will be due prescribed global tank accelerations.
Both 2D and 3D modelling approaches are to be employed and compared. In addition to documenting the level of mesh independence and spatial order of accuracy, the following efficiency metrics are to be reported on for each calculation to allow comparing different schemes:
eta = %Accuracy/(Ncpu x CPUtime)
where:
%Accuracy = |Predicted - Benchmark|/Benchmark
Ncpu is the number of processors
CPUtime is wall clock time
The second metric is known as the z number:
z = (Ncells x Ntimesteps) / (Ncpu x CPUtime)
where:
Ncells is the number of computational cells
Ntimesteps is the number of time-steps solved for.
WP4: Structural Dynamics
WP Leader: UNIVERSITY OF BRISTOL (UB)
The aim of WP4 is to develop the models and knowledge of the dynamics of elastic wings filled with sloshing fuel. The models development in this WP will reflect the following key requirements: (R1) the ability to model large motions of elastic wings, and (R2) the ability to extend these models, trough coupling or direct modelling, to include the point or distributed loading from the sloshing liquid models. The knowledge developed in WP4 concerns the analytical work required to validate the dynamic behavior of the developed models. The analytical focus will be aimed at: (F1) the understanding of the overall combined damping properties across the range of the wing response scales; (F2) the interpretation of the new and emergent interactional dynamics across the range of the wing response scales.
Individual objectives are:
(O1) To develop the geometrically nonlinear 3D reference Finite Element model.
(O2) To develop the geometrically exact 2D beam model.
(O3) To validate and interpret the “wet” dynamics of the wing models.
WP5: Fluid/Structure Coupling
WP Leader: UNITED KINGDOM RESEARCH AND INNOVATION (UKRI)
The objective of this WP is to produce a robust and accurate Fluid Structure Interaction (FSI) model that captures the physics needed to create an in-silico representation of a deformable wing containing liquid fuel. Once created, the tool will be used to assess aircraft fuel sloshing loads, with the goals being (i) to reduce conservatism in the structural design by generating more accurate damping and load results, and (ii) to explore possibilities for load adjustment that may benefit long-term structural health.
Outputs of WP3 and WP4 will be coupled together to develop a tightly-coupled FSI methodology that is robust, even at low mass ratios. The method will be capable of coupling both mesh-based and meshless techniques, with nonconforming interfaces. To allow the exchange of information at run-time between the Finite Element Method (FEM) solver MSC Nastran, an MSC OpenFSI interface will be employed.
Thanks to this interface the field of nodal forces computed by the fluid solver are transferred to the structural solver and used as input to deform the structure. After the structural solution is completed, the nodal displacement, velocity and accelerations are sent back to the fluid solver.
To allow for interpolation of force and displacement between potentially disparate solver formulations (Lagrangian vs. Eularian), with different discretization methods (FEM, VOF, SPH, etc.) occupying different regions of physical space, inter-solver data transfer will be point-cloud based. This has the advantage that all mesh connectivity and solver-type dependence is removed. Efficient interpolation from this point-cloud in a conservative or consistent manner (preserving energy, force and moment) can be achieved using Radial Basis Functions (RBFs).
Verification of the coupled solution will be performed against FSI benchmark cases available in the literature, while validation will be achieved through comparison with the experimental data of WP2. Both rigid and flexible fuel tanks will be compared, to assess their influence.
UKRI will also consider how best to tackle the coupling at scale (e.g. O(104 - 106) computational threads) on High Performance Computing (HPC) platforms, by looking at the techniques used to achieve the data transfer itself, as well as how the problems are partitioned and then placed on distributed platforms. Different approaches will be considered depending on the nature of the adopted Computational Fluid Dynamics (CFD) solvers (mesh-based or particle-based models).
WP6: ROM and Analytical Models
WP Leader: UNIVERSITA DEGLI STUDI DI ROMA LA SAPIENZA (USRS)
The objective of WP6 is the development, assessment, and applications of Reduced Order Models (ROMs) for fuelsloshing/tank systems based on i) an Equivalent Mechanical System (EMM) approach, ii) novel reduced order CFD,iii) an input/output frequency-domain linearized (LFD) identification approach. The sloshing ROMs have different levels of physical fidelity, computational costs, and dynamic coupling capabilities with the other surrounding disciplines as, for example, structural dynamics and aeroelasticity. The first approach – denoted as ROM-I – widely used in many fields of mechanical ad civil engineering for modelling sloshing phenomena, is easy to implement, numerically efficient, and suitable for design purpose but has the physical limit of describing the sloshing dynamics simply as combination of harmonic-oscillator dynamics. The second ROM approach – denoted as ROM-II – will employ a new consistent pressure integration method to allow 2D and 3D CFD to be conducted with specially developed high order pressure integration and 1D baffle orifice elements. This has the full advantage of being generic with respect tank geometry while being expected to be up to 1000 faster than traditional CFD. Finally, the third ROM approach – denoted as ROM-III – has the advantage to be CFD or experimental data based and applicable for coupled interaction with aircraft dynamics and aeroelasticity but it can model only linearized sloshing dynamics.
WP7: Integration into Design Framework
WP Leader: ARIANEGROUP GMBH (AG)
The aim of WP5 is to consolidate the different elements in the frame of an executable program structure / industrial design framework.
Individual objectives are:
(O4) Definition of interface document as a basis for the following work packages
a. WP3 (CFD)
b. WP4 (Structural Dynamics)
c. WP5 (Fluid/Structure Coupling)
d. WP6 (Reduced Order Models - ROM)
e. WP8 (Dissemination, Communication & Exploitation)
(O5) Implementation of the different software components into industrial design framework
(O6) Develop processes/methods to understand results and facilitate decision making process
The outcome of WP7 should be a self-standing software program to be operated by Airbus for further validation.
Core element of the program is the structural dynamics part, i.e. the NASTRAN software. It will be coupled to the CFD tools, simulating the liquid motion (WP3) via the interface, to be programmed in WP5. Note that each full-order model is interchangeable with ROMs developed in WP6. The dynamic response of the wing (WP4) will be fed into the flight controller (WP8) leading to an actuator response (WP8). This response is the input for the structural dynamics (WP4) in the next time step of the simulation.
WP8: Dissemination, Communication & Exploitation
WP Leader: EASN Technology Innovation Services (EASN)
WP8 aims to ensure extensive outreach of the SLOWD to the right audiences by using the right language at the right time so as to maximize their exploitation opportunities and achieve the intended impacts. More precisely, the objectives of WP8 are to:
- Create value and ensure wide-scale uptake of project results through comprehensive dissemination and communication strategy for each identified target group
- Provide open access to the results achieved within the project
- Publish achievements and lessons learnt through events and local and international press during but also beyond the end of the project
- Develop synergies with other projects in related technological fields
- Prioritise areas for extending the developed approach into other applications, value chains and sectors
- Create awareness for the social benefits of the project outcomes by targeting the general public
- Provide adequate and effective protection and management of the knowledge created in the project, having due regard to the legitimate interests of the partners concerned
- Provide a strategy for exploiting the results and outcomes to civil aircraft applications